本数据集由专业岗位的专业人员进行拍摄采集,比如制作咖啡场景是由咖啡师在岗位上真实操作采集。第一视角操作聚焦现实复杂任务的完整流程的全程记录,确保数据具备长程时序关联性与任务闭环特性;第一视角真实世界漫游也完整呈现空间探索与路径规划过程。
本数据集手部第一视角覆盖数千种专业操作类型,比如农田操作、工厂操作、后厨操作、汽车修理,理发操作、手艺人操作、宠物美容等;漫游第一视角则包含城市街道,自然景观、仓储空间等多样化场景。助力模型突破场景限制,实现泛化能力的指数级提升。
本数据集以真实世界为蓝本,聚焦专业人员在具体工作岗位中的第一视角手部操作与漫游视频数据。
每一帧画面均源自真实场景的精准捕捉,增强模型对于物理规律与操作逻辑的理解。
两大旗舰产品,涵盖手部操作与空间漫游的完整数据解决方案
为世界模型与具身智能预训练提供核心数据资产
First-Person Long-Range Complex Hand Operation
第一视角长程复杂任务手部操作数据集。专注于捕捉人类在完成复杂任务时的手部动作与物体交互,为机器人操作、具身智能提供高质量训练数据。
First-Person Real-World Roaming
第一视角真实世界漫游数据集。采集真实环境中人类活动的空间感知数据,涵盖室内外多种场景,为空间智能、世界模型提供真实数据支撑。
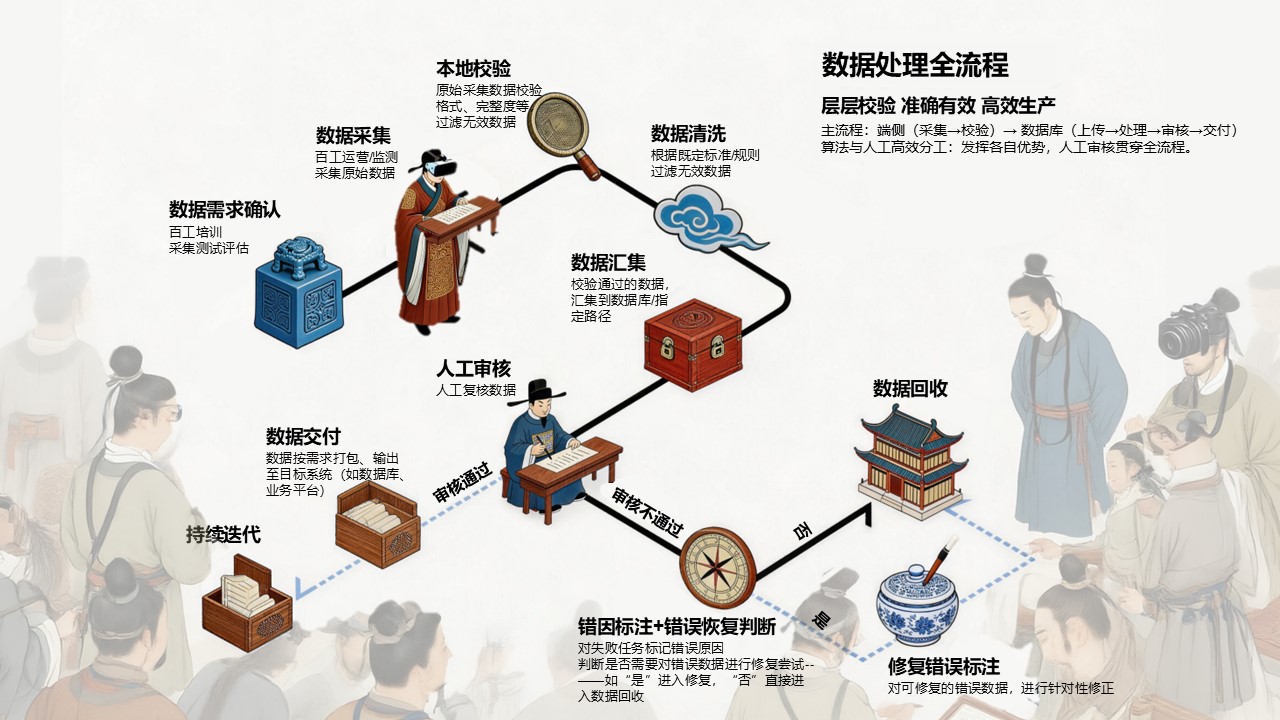
从数据原始采集到成品数据产品交付
依赖算法与人工的紧密合作,善采众长,高效准确
分别展示Operatvie Stream(OS)和Real Roam(RR)各三个数据示例
文字标注(可选):这段视频展示了在花店内,一个人正在精心整理和包装一束以橙黄色玫瑰为主的鲜花花束。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps
文字标注(可选):这段视频展示了厨师制作鱼汤料理的过程,包括切配鱼片、烫煮食材并放入盛有配菜的碗中的操作。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps
文字标注(可选):这段视频展示了汽修工人在车间为车辆进行更换机油的保养作业,包括拧开底盘螺丝放油以及拆卸和清理机油滤芯。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps
文字标注(可选):这段视频展示了第一视角穿行在一条老旧居民区狭窄巷道内的场景,周围可见斑驳的砖墙、低矮的平房建筑以及停放的电动车。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps
文字标注(可选):这段视频展示了第一视角在晴朗天气下沿着郊区公路骑行的场景,沿途可见路边的民居建筑、停放的车辆以及远处的山脉。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps
文字标注(可选):这段视频展示了第一视角在晴朗天气下的滑雪场环境,包括乘坐魔毯上坡以及在宽阔平整的雪道上滑行的场景,背景是连绵的山脉。
百工本象数据集基本存储格式为MP4格式文件 数据参数:1080P/30fps